Neural Radiance Fields (NeRF) and Multi-View Stereo (MVS) represent two cutting-edge methods in 3D reconstruction technology, focusing on generating detailed spatial representations from images. NeRF utilizes deep learning to synthesize novel views by modeling volumetric scene functions, while MVS reconstructs 3D geometry by computing dense depth maps from multiple images. Explore the differences and advantages of NeRF and MVS to understand their impact on computer vision and graphics.
Why it is important
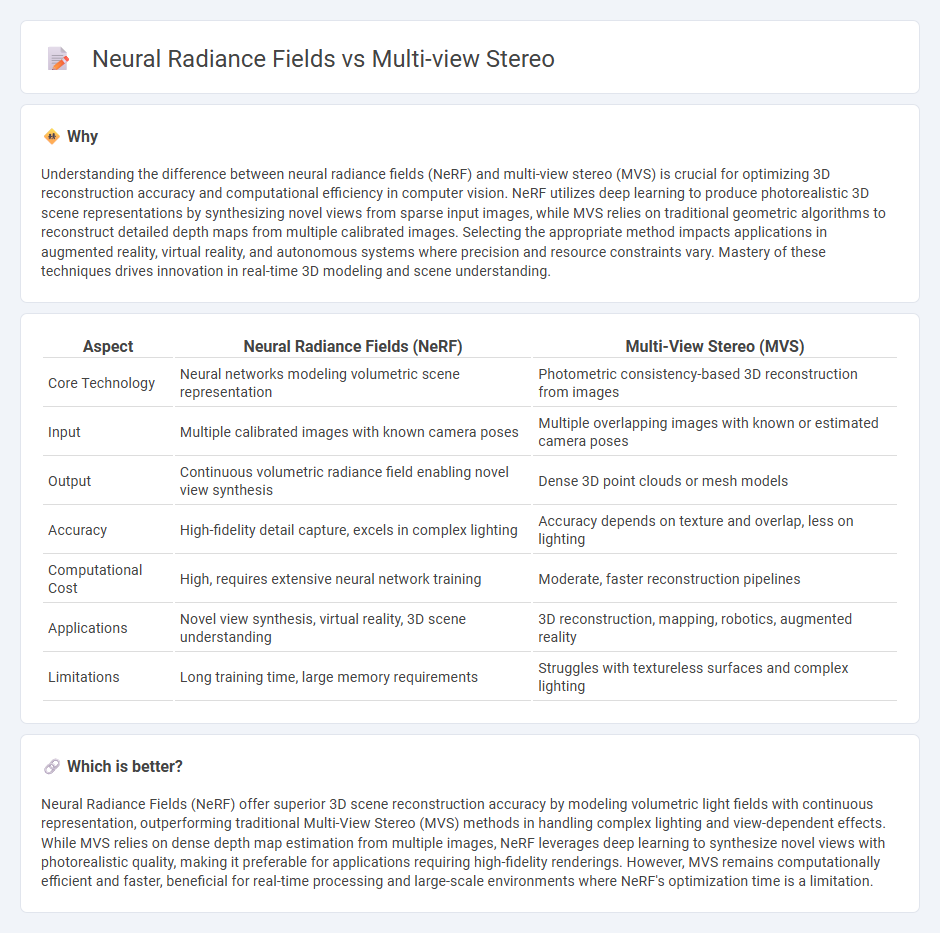
Understanding the difference between neural radiance fields (NeRF) and multi-view stereo (MVS) is crucial for optimizing 3D reconstruction accuracy and computational efficiency in computer vision. NeRF utilizes deep learning to produce photorealistic 3D scene representations by synthesizing novel views from sparse input images, while MVS relies on traditional geometric algorithms to reconstruct detailed depth maps from multiple calibrated images. Selecting the appropriate method impacts applications in augmented reality, virtual reality, and autonomous systems where precision and resource constraints vary. Mastery of these techniques drives innovation in real-time 3D modeling and scene understanding.
Comparison Table
| Aspect | Neural Radiance Fields (NeRF) | Multi-View Stereo (MVS) |
|---|---|---|
| Core Technology | Neural networks modeling volumetric scene representation | Photometric consistency-based 3D reconstruction from images |
| Input | Multiple calibrated images with known camera poses | Multiple overlapping images with known or estimated camera poses |
| Output | Continuous volumetric radiance field enabling novel view synthesis | Dense 3D point clouds or mesh models |
| Accuracy | High-fidelity detail capture, excels in complex lighting | Accuracy depends on texture and overlap, less on lighting |
| Computational Cost | High, requires extensive neural network training | Moderate, faster reconstruction pipelines |
| Applications | Novel view synthesis, virtual reality, 3D scene understanding | 3D reconstruction, mapping, robotics, augmented reality |
| Limitations | Long training time, large memory requirements | Struggles with textureless surfaces and complex lighting |
Which is better?
Neural Radiance Fields (NeRF) offer superior 3D scene reconstruction accuracy by modeling volumetric light fields with continuous representation, outperforming traditional Multi-View Stereo (MVS) methods in handling complex lighting and view-dependent effects. While MVS relies on dense depth map estimation from multiple images, NeRF leverages deep learning to synthesize novel views with photorealistic quality, making it preferable for applications requiring high-fidelity renderings. However, MVS remains computationally efficient and faster, beneficial for real-time processing and large-scale environments where NeRF's optimization time is a limitation.
Connection
Neural Radiance Fields (NeRF) enhance Multi-View Stereo (MVS) by providing continuous volumetric scene representations from sparse 2D images, enabling accurate 3D reconstructions with fine details and realistic lighting. MVS algorithms supply multi-angle image correspondences essential for NeRF to infer scene geometry and radiance fields effectively. Integrating NeRF with MVS improves depth estimation and novel view synthesis, advancing applications in augmented reality, robotics, and computer vision.
Key Terms
Depth Estimation
Multi-view stereo (MVS) leverages multiple images from different viewpoints to accurately reconstruct dense and high-resolution depth maps by matching pixel correspondences, excelling in geometric consistency and surface detail. Neural Radiance Fields (NeRF) model complex light fields to generate photorealistic 3D scenes but often produce less precise depth estimates due to their implicit representation and reliance on volumetric rendering techniques. Explore more about how these cutting-edge methods compare in depth estimation for applications in 3D reconstruction and augmented reality.
Volumetric Rendering
Multi-view stereo reconstructs 3D scenes by triangulating points from multiple images, generating dense point clouds or meshes ideal for volumetric rendering due to accurate surface geometry. Neural Radiance Fields (NeRF) synthesize novel views by learning a continuous volumetric representation that encodes color and density for each spatial coordinate, offering superior detail and realistic lighting effects during rendering. Explore how combining multi-view stereo and NeRF techniques enhances volumetric rendering quality and efficiency.
Photometric Consistency
Multi-view stereo (MVS) relies heavily on photometric consistency by matching pixel intensities across multiple images to reconstruct 3D geometry, ensuring accurate surface detail through color and texture alignment. Neural Radiance Fields (NeRF) encode volumetric scene representations using continuous neural networks, optimizing photometric loss but with a focus on novel view synthesis rather than explicit geometry extraction. Explore the nuances of photometric consistency in MVS and NeRF to deepen your understanding of 3D reconstruction techniques.
Source and External Links
Photogrammetry Explained: From Multi-View Stereo to Structure ... - Multi-view stereo reconstructs a complete 3D scene by iteratively performing depth triangulation from multiple overlapping images, improving on two-view reconstructions by filling in gaps using more viewpoints and known camera parameters.
Efficient Multi-view Stereo via Attention-Driven 2D Convolutions - MVS2D is a state-of-the-art deep learning algorithm for multi-view stereo that integrates multi-view constraints using attention-driven 2D convolutions, achieving precise 3D reconstructions with faster computation than traditional 3D convolution methods.
What is Multi-view Stereo (MVS) - Activeloop - Multi-view stereo is a computer vision technique that reconstructs 3D models from multiple 2D images by analyzing geometric and visual cues, with applications in VR, autonomous navigation, cultural heritage preservation, and 3D mapping.