Neural Radiance Fields (NeRFs) offer a cutting-edge approach to 3D scene representation by synthesizing photorealistic views from sparse input images through continuous volumetric rendering. Voxel grids represent 3D space as discrete cubes, simplifying computations but often sacrificing detail and requiring substantial memory. Explore the differences between NeRFs and voxel grids to understand their impact on computer vision and graphics innovation.
Why it is important
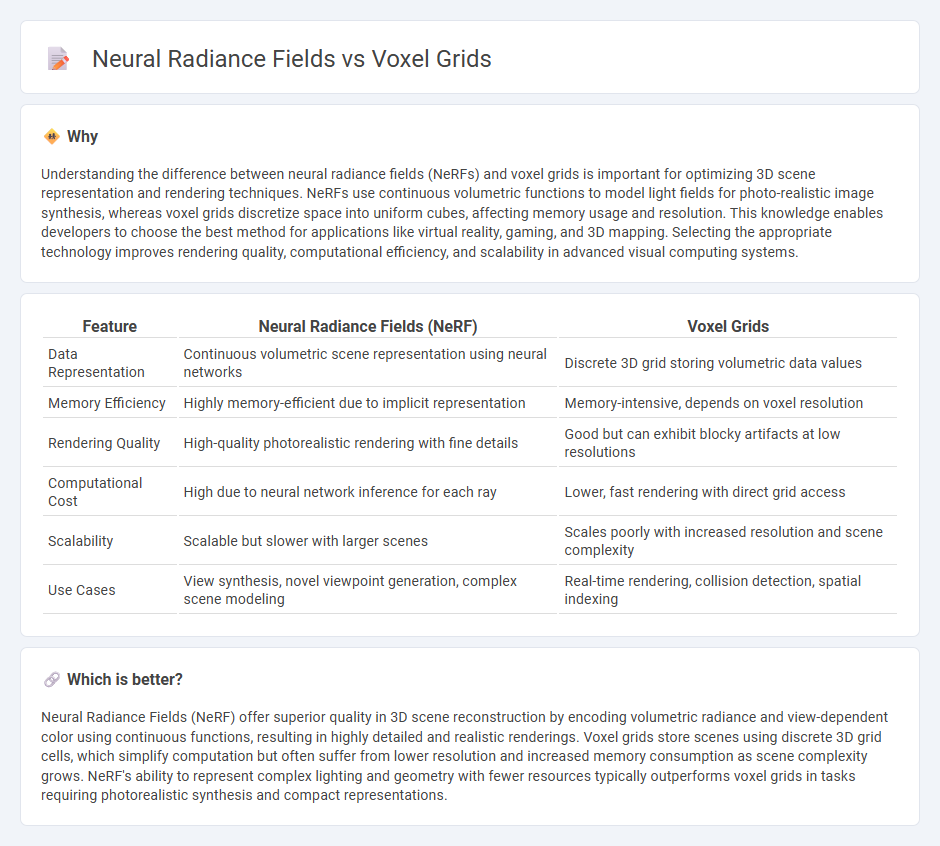
Understanding the difference between neural radiance fields (NeRFs) and voxel grids is important for optimizing 3D scene representation and rendering techniques. NeRFs use continuous volumetric functions to model light fields for photo-realistic image synthesis, whereas voxel grids discretize space into uniform cubes, affecting memory usage and resolution. This knowledge enables developers to choose the best method for applications like virtual reality, gaming, and 3D mapping. Selecting the appropriate technology improves rendering quality, computational efficiency, and scalability in advanced visual computing systems.
Comparison Table
| Feature | Neural Radiance Fields (NeRF) | Voxel Grids |
|---|---|---|
| Data Representation | Continuous volumetric scene representation using neural networks | Discrete 3D grid storing volumetric data values |
| Memory Efficiency | Highly memory-efficient due to implicit representation | Memory-intensive, depends on voxel resolution |
| Rendering Quality | High-quality photorealistic rendering with fine details | Good but can exhibit blocky artifacts at low resolutions |
| Computational Cost | High due to neural network inference for each ray | Lower, fast rendering with direct grid access |
| Scalability | Scalable but slower with larger scenes | Scales poorly with increased resolution and scene complexity |
| Use Cases | View synthesis, novel viewpoint generation, complex scene modeling | Real-time rendering, collision detection, spatial indexing |
Which is better?
Neural Radiance Fields (NeRF) offer superior quality in 3D scene reconstruction by encoding volumetric radiance and view-dependent color using continuous functions, resulting in highly detailed and realistic renderings. Voxel grids store scenes using discrete 3D grid cells, which simplify computation but often suffer from lower resolution and increased memory consumption as scene complexity grows. NeRF's ability to represent complex lighting and geometry with fewer resources typically outperforms voxel grids in tasks requiring photorealistic synthesis and compact representations.
Connection
Neural radiance fields (NeRFs) represent 3D scenes by predicting color and density at continuous spatial locations, allowing high-fidelity view synthesis. Voxel grids serve as a discrete volumetric structure that can efficiently store and query scene information, enhancing NeRFs' rendering speed and memory usage. Integrating voxel grids with NeRF models optimizes spatial data representation, improving real-time rendering performance in computer vision and graphics applications.
Key Terms
Discretization
Voxel grids discretize 3D space into uniform, fixed-size cubes, enabling straightforward rendering and efficient data storage but often suffer from high memory consumption and limited resolution scalability. Neural Radiance Fields (NeRFs) represent scenes continuously through neural networks, allowing for smooth and high-fidelity reconstructions without explicit grid discretization, but require intensive optimization and computational resources. Explore further advancements in discretization techniques and their impact on 3D scene representation to enhance rendering efficiency and quality.
Implicit Representation
Implicit representation in voxel grids encodes 3D shapes through discrete volumetric data, facilitating straightforward spatial queries but often resulting in high memory usage. Neural radiance fields (NeRFs) represent scenes with continuous functions parameterized by neural networks, offering compact storage and smooth rendering of complex lighting and geometry. Explore the advancements in implicit representation to understand their impact on 3D reconstruction and visualization.
Volumetric Rendering
Voxel grids represent 3D space using discrete volumetric elements, enabling efficient volumetric rendering but often facing challenges with memory consumption and resolution limits. Neural Radiance Fields (NeRFs) use continuous volumetric representations powered by deep learning, producing high-fidelity renderings with smooth details and adaptive sampling techniques that reduce computational load. Explore how advanced volumetric rendering techniques balance performance and quality with voxel grids and neural radiance fields here.
Source and External Links
Voxel grids -- OVITO User Manual 3.13.0 documentation - A voxel grid is a structured 2D or 3D grid of cells representing spatial fields, which can hold numeric properties like charge density or temperature, and can be imported, created, or exported for visualization such as with ParaView.
Volume Rendering Based On 3D Voxel Grids - Scratchapixel - Voxel grids represent data on a 3D grid storing values like density in fluid simulations, where coordinates are normalized and mapped to discrete voxel space to read data efficiently from memory.
Voxelization -- Open3D latest documentation - Voxel grids can be generated from 3D point clouds where voxels are occupied if containing points, with colors averaged from points, and support queries to test point inclusion within voxels.